Anatomy Of High Performance Matrix Multiplication 高性能矩阵乘法剖析
Anatomy of High-Performance Matrix Multiplication
http://www.cs.utexas.edu/~flame/pubs/GotoTOMS_revision.pdf
1. INTRODUCTION
实现接近最优性能的矩阵乘法,不仅需要在宏观层级了解如何将运算拆分成kernel,还需要在微观层级工程实现高性能kernel。这篇paper主要针对宏观问题,也就是如何发现高性能kernel,而不是微观层级的如何设计和实现高性能kernel。 在一个复杂的多级内存架构下,1方法优化减少在相邻层内存之间的数据搬移,与23不同的是,1提出“inner-kernel”概念,对于某些$m_c\times k_c$的矩阵$\tilde{A}$计算$C:=\tilde{A}B+C$,矩阵$\tilde{A}$以某种打包的格式连续存储,并且可以容纳在cache内。但是这里用到的内存结构是不现实的:
- 假设矩阵$\tilde{A}$的inner-kernel计算都在L1 cache
- 忽视了Translation Look-aside Buffer (TLB)问题 最近的[^4]]观察到
- 浮点运算单元能够执行的浮点运算操作数,可以从寄存器流出到L2 cache的浮点数很少。
- 矩阵$\tilde{A}$尺寸的限制因素是TLB能访问的数据量
我们同时发现
- 我们考虑高性能矩阵乘法时需要考虑6种inner-kernel,1[^5]只考虑了其中3种
第二章介绍了本文用到的符号,第三章介绍了一种分层的矩阵乘法实现方法,第四章介绍inner-kernel实现。第五章介绍了现实中最常见场景下的算法。第六章给出了现实中如何调整算法参数以优化性能。第七章介绍了不同架构下的算法性能。最后一章包含一些总结。
2. NOTATION
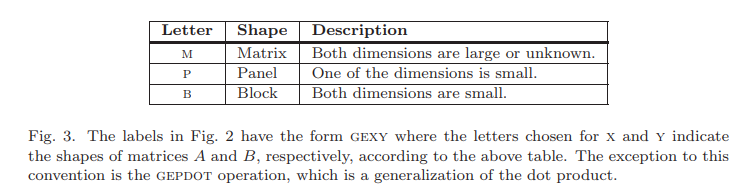
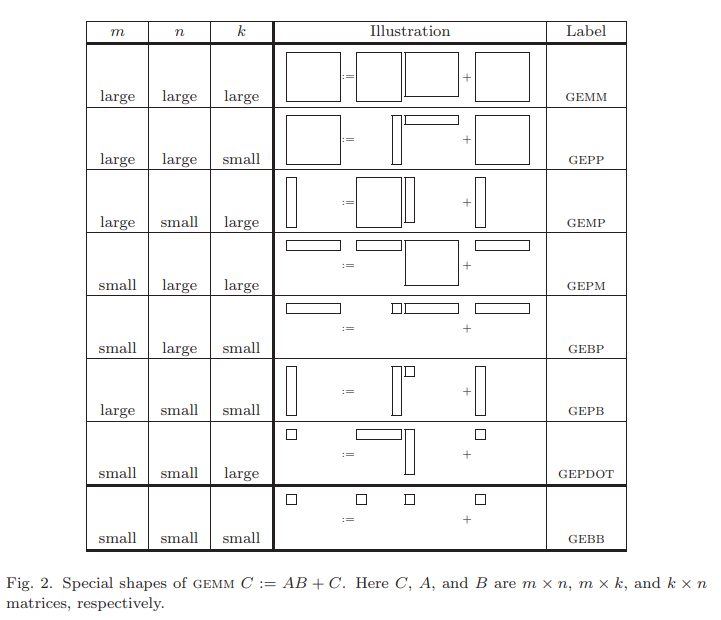
矩阵分解矩阵乘法的是核心,给定一个$m\times n$的矩阵$X$,本文中只考虑按行分块或者按列分块 \(X= \begin{pmatrix} X_0 & X_1 & \cdots & X_{N-1} \end{pmatrix} = \begin{pmatrix} \check{X}_0 \\ \check{X}_1 \\ \cdots \\ \check{X}_{M-1} \\ \end{pmatrix}\) 这里除了$X_{N-1}$和$\check{X}{M-1}$以外,$X_j$都有$n_b$列,$\check{X}_i$都有$m_b$行,$X{N-1}$和$\check{X}_{M-1}$的行列可能会更少。 原始矩阵的乘法将被分解成若干子矩阵的乘法,将三种常见的特殊尺寸的矩阵抽象出来
3. A LAYERED APPROACH TO GEMM
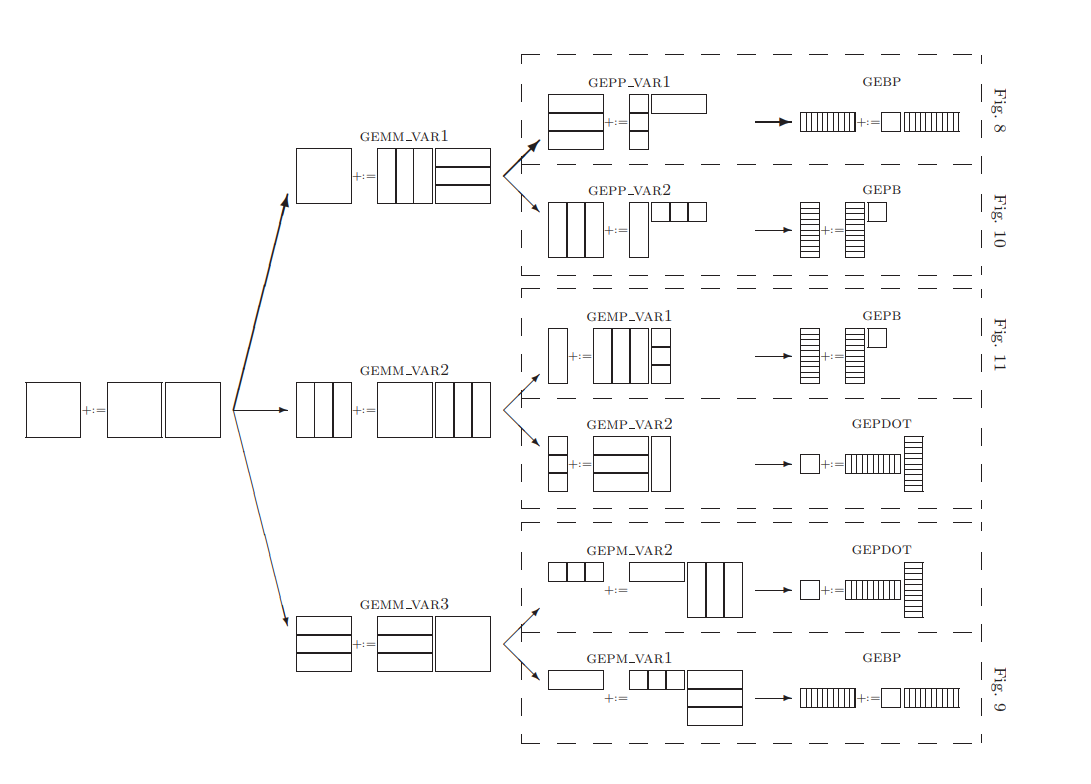
如下图所示,GEMM可以被分解成多个GEPP,GEMP或者GEPM,进一步可以分解成多个GEBP,GEPB或者GEDOT kernel。
4. HIGH-PERFORMANCE GEBP, GEPB, AND GEPDOT
现在我们讨论GEBP,GEPB和GEDOT的高性能实现。首先我们在一个简单内存结构模型下分析数据搬移开销。更复杂和实际的内存结构模型将在4.2章节讨论。
4.1 Basics
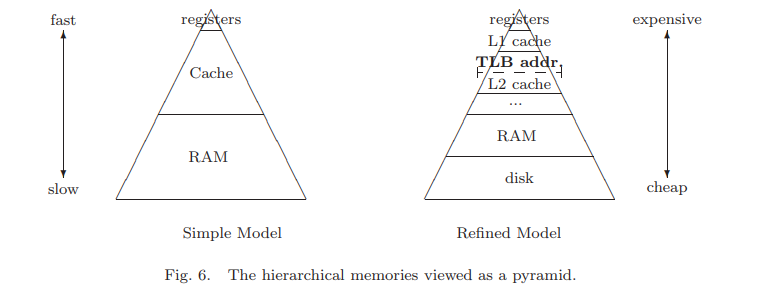
下图左边是一个非常简单的多层内存模型,只有寄存器/ cache/RAM。
在这种简单模型结构下考虑优化GEBP,$C_{m_c,n}+=A_{m_c,k_c}B_{k_c,n}$,其中
- $A$是block,$A\in \Bbb{R}^{m_c\times k_c}$
- $B$是panel,$B\in \Bbb{R}^{k_c\times n}$
- $C$也是panel,$C\in \Bbb{R}^{m_c\times n}$
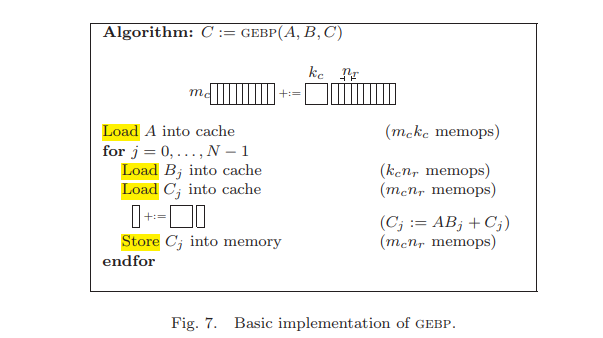
3个假设
- Assumptions (a):$m_c$和$k_c$都足够小,使得cache能够容纳矩阵$A$,矩阵$B$的$n_r$列$B_j$和矩阵$C$的$n_r$列$C_j$
- Assumptions (b):如果$A$,$B_j$和$C_j$都在cache里,那么$C_j:=AB_j+C_j$能全速利用CPU
- Assumptions (c):$A$ 可以一直保留在cache里不被切换出去
基于以上三点假设,上图中GEBP的RAM和cache之间的数据搬移开销为$m_ck_c+k_cn+2m_cn$ memops
- 把$A$从RAM加载到cache,$m_ck_c$
- 把$B_j$从RAM加载到cache,$k_cn$
- 把$C_j$从RAM加载到cache,$m_cn$
- 计算完,把$C_j$结果从cache加载到RAM,$m_cn$
而$C_j:=AB_j+C_j$的计算量为$2m_ck_cn$ flops,那么计算量和数据搬移的比例是 \(\frac{2m_ck_cn}{m_ck_c+k_cn+2m_cn} \approx \frac{2m_ck_cn}{k_cn+2m_cn}=\frac{2m_ck_c}{k_c+2m_c}\frac{flops}{memops} \quad \text{where}\quad m_c<<n\)
问题变成,如何选择矩阵$A$的尺寸$m_c$和$k_c$,使得矩阵尺寸满足Assumptions (a)-(c),而且$\frac{2m_ck_c}{k_c+2m_c}$值最大。
- 最大化$k_cm_c$,尽可能选择最大尺寸的矩阵$A$,使得$A, B_j, C_j$能够放进cache
- 在$m_ck_c \leq K$前提下,求$\frac{2m_ck_c}{k_c+m_c}$最大值问题,数学上转换成几何问题,一个长方形边长分别是$2m_c$和$k_c$,在长方形面积受限$m_ck_c \leq K$条件下,如何最大化长方形周长$2(k_c+2m_c)$,这个问题在数学上的最优解就是$k_c=2m_c$,不应该是方阵?
现实中$k_c$的选择还受一些其他因素制约,我们将在6.3章节看到。 类似地可以分析GEPB和GEDOT操作。
4.2 Refinements
考虑更加实际的应用场景,假设矩阵是column-major order按列存储的。
4.2.1 Choosing the cache layer
Fig.6的右边描述了更准确的内存结构,实际上cache也是分成多层的。 首先问题是,尺寸为$k_c\times m_c$的矩阵$A$应该保留在哪一层cache?答案肯定是,在满足Assumptions (a)-(c)的前提下,越快越好,最接近寄存器最快的那一层cache,也就是L1 cache。但是L1 cache天然地非常小,那么可以把矩阵$A$应该保留在L2 cache里,同时让尺寸$k_c\times m_c$更大一些? $R_{comp}$表示CPU能处理的浮点运算操作速度,$R_{load}$表示CPU能从L2 cache加载到寄存器的速度,假设
- 矩阵$A$保留在L2 cache,而矩阵$B_j$和$C_j$保留在L1 cache
- L1 cache和寄存器之间带宽足够,也就是忽略矩阵$B_j$和$C_j$的加载时间
那么$C_j:=AB_j+C_j$的计算量为$2m_ck_cn_r$ flops,时间开销为$\frac{2m_ck_cn_r}{R_{comp}}$,带宽开销为从L2 cache加载矩阵$A$到寄存器的数据量$m_ck_c$,时间开销为$\frac{m_ck_c}{R_{loa d}}$。为了克服矩阵$A$的加载时间,必须保证 \(\frac{2m_ck_cn_r}{R_{comp}} \geq \frac{m_ck_c}{R_{load}} \\ n_r \geq \frac{R_{comp}}{2R_{load}}\)
$B_j$和$C_j$保留在L1 cache,$A$保留在L2 cache,希望矩阵计算时间大于L2 cache的加载时间,panel矩阵$B, C$按$n_r$行或$n_r$列拆分成$B_j, C_j$矩阵时,拆分尺寸$n_r$必须足够大,$n_r$的最小值与CPU浮点运算操作速度$R_{comp}$和L2 cache加载到寄存器的速度$R_{load}$相关。
4.2.2 TLB considerations
第二个考量与系统页管理有关。通常我们的系统使用虚拟内存,因此可用内存大小不受实际物理内存大小限制,内存是分页的。有一张page table来映射虚拟地址和物理地址,保持跟踪这一页实在内存还是硬盘。问题是这个表本身可能很大,比如若干Mbytes,妨碍虚拟内存到物理内存的快速转换。为了克服这个问题,一张更小的表Translation Look-aside Buffer (TLB),用于存储最近用到的表信息。当一个虚拟地址能在TLB里找到时,转换速度是很快的。但没有找到时,称为TLB miss,需要重新访问page table。将信息从page table里拷贝到TLB里。TLB可以看做是page table的cache。最近更有些架构中出现类似L2 cache的L2 TLB。 TLB的存在意味着我们需要满足额外的假设
- Assumptions (d):为了保证计算$C_j:=AB_j+C_j$时不会出现TLB miss,$m_c, k_c$必须足够小使得,block矩阵$A$,panel矩阵$B, C$按$n_r$行或$n_r$列拆分成$B_j, C_j$矩阵可以同时被TLB访问
- Assumptions (e):在直到计算完成之前,block矩阵$A$必须一直能被TLB访问。
4.2.3 Packing
通常矩阵$A$是一个大矩阵分解之后的小矩阵,因此矩阵$A$的数据在内存中不是连续的, 不连续意味着可能的TLB miss。解决方法是将矩阵$A$ pack成连续数组$\tilde{A}$。适当选择参数$m_c, k_c$使得$\tilde{A}, B_j, C_j$可以容纳在L2 cache里,并且可以同时被TLB访问到。
Case 1: The TLB is the limiting factor
假设系统有$T$个TLB entries,$\tilde{A}, B_j, C_j$对应的TLB entries数目是$T_{\tilde{A}}, T_{B_j}, T_{C_j}$,那么有 \(T_{\tilde{A}}+2(T_{B_j}+T_{C_j}) \leq T\)
$ T_{B_j}, T_{C_j}$前面有系数2是因为当计算$C_j:=\tilde{A}B_j+C_j$时,TLB需要同时准备好$B_{j+1}, C_{j+1}$ 相比于将$A$加载到L2 cache的开销,将$A$ pack成$\tilde{A}$的操作的开销,不会太大。理由是,packing可以被安排,使得$\tilde{A}$加载到L2 cache和能被TLB访问后,立即能为随后计算使用。前提是,$A$的访问开销不会明显大于将$A$加载到L2 cache,而这一点即使不做$A$没有做pack也是必然的。 GEPP或者GEPM会被分解成GEBP,在之前的case里,block矩阵$B$会在多个GEBP里重用。这就意味着将$B$拷贝成连续数组$\tilde{B}$是有价值的,$B_j$对应的TLB entries数目是$T_{B_j}$也会对应下降到$T_{\tilde{B}_j}$。
Case 2: The size of the L2 cache is the limiting factor.
可以得到case 1类似的结论。
4.2.4 Accessing data contiguously.
为了寄存器更高效的搬移数据,pre-fetch?连续CPU指令需要读取的数据在内存中必须连续。这不仅需要pack,还需要重排。第6章详细介绍。
4.2.5 Implementation of GEPB and GEDOT
类似GEBP
5. PRACTICAL ALGORITHMS
介绍Fig. 4中的6种实现
5.1 Implementing gepp with gebp
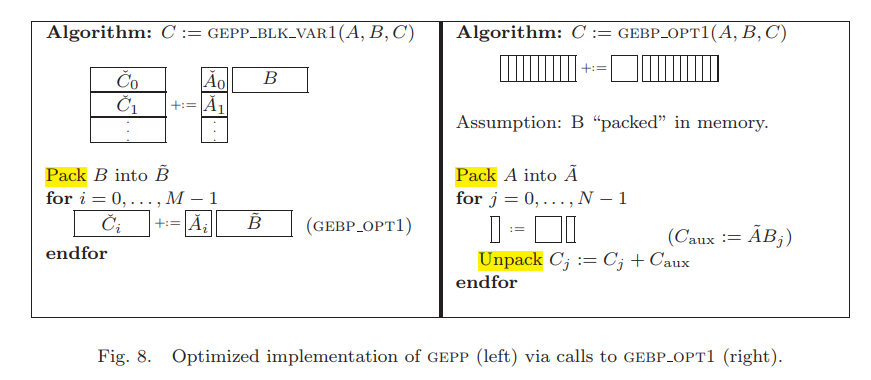
在gebp_opt1方法中,我们希望$A$一直保留在L2 cache里,$B, C$反复更新在L1 cache,因此需要确定$A$的尺寸最大可以多大,$A$的尺寸上限决定于可用TLB entry数目$\tilde{A}$
- 将$B$ packing成$\tilde{B}$,$B_j$和$B_{j+1}$各需要一个TLB entry
- 用$C_{aux}$尺寸是表示着对于这个buffer只需要用到一个TLB entry,$C_j$尺寸是$m_c\times n_r$,如果$m_c$很大的话,每个TLB entry包含一个$m_c$,最多需要$n_r$个TLB entry
- 那么剩余留给$\tilde{A}$的TLB数目是$T_{\tilde{A}}=T-(n_r+3)$
$C_j$是否连续不是太大的问题,因为这部分数据在GEPP计算时没有重用,只会访问一次。 一旦$B$和$A$变成连续的$\tilde{B}$和$\tilde{A}$后,gebp_opt1内的循环计算可以达到浮点运算速度峰值。
- packing $B$到$\tilde{B}$的拷贝,是内存到内存的拷贝,开销和$k_c\times n$成正比,分摊到$2m\times k_c\times n$的计算量里,每次拷贝需要$2m$次计算,这种packing操作打乱了之前的TLB上下文。
- packing $A$到$\tilde{A}$的拷贝,如果合理编排的话,可以是内存到L2 cache的拷贝,开销和$k_c\times m_c$成正比,分摊到$2m\times k_c\times n$的计算量里,每次拷贝需要$2n$次计算。实际中,这种拷贝不是很耗时。
这种方法适合,$m,n$很大而$k$不大的GEMM类型,如GEPP的定义。
5.2 Implementing gepm with gebp
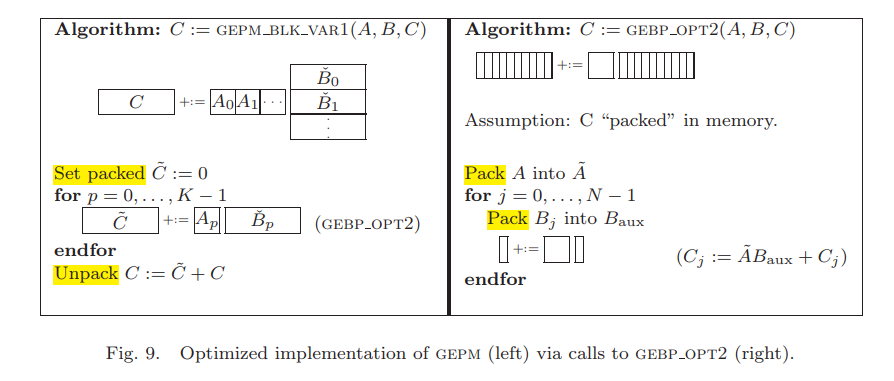
和GEBP不同的是,GEBP中的$C$只需访问一次,而GEPM里的$C$需要反复更新,因此值得将结果加到$C$之前先累加$\tilde{C}=AB$,而不是没计算一次$\tilde{C}=AB$就加到$C$上。$\check{B}p$没有被重用,因此没有pack。此时$B_j$最多需要$n_r$个TLB entry,$B{temp}, C_j, C_{j+1}$各需要一个,那么剩余留给$\tilde{A}$的TLB数目还是$T_{\tilde{A}}=T-(n_r+3)$
5.3 Implementing gepp with gepb
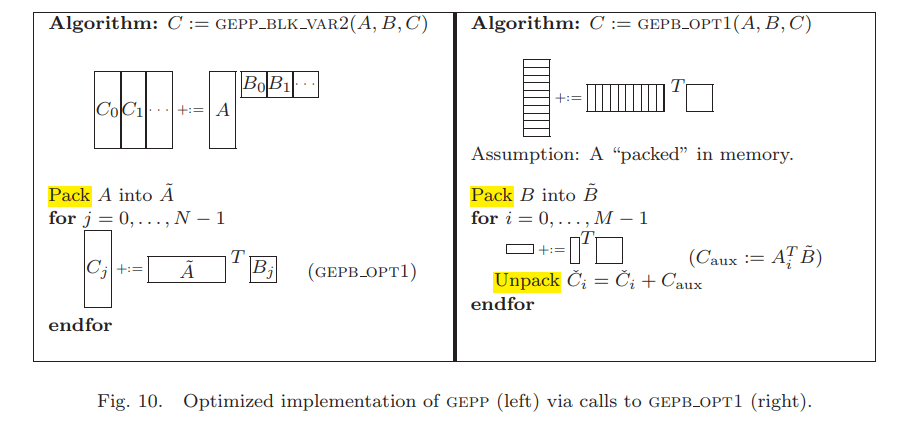
$A$做了pack和转置来保证连续访问,在GEPB里$B$做pack而且保存在L2 cache,因此这里我们需要最大化$T_{\tilde{B}}$,同理$T_{\tilde{A}}$的上限是$T-(n_r+3)$
5.4 Implementing gemp with gepb
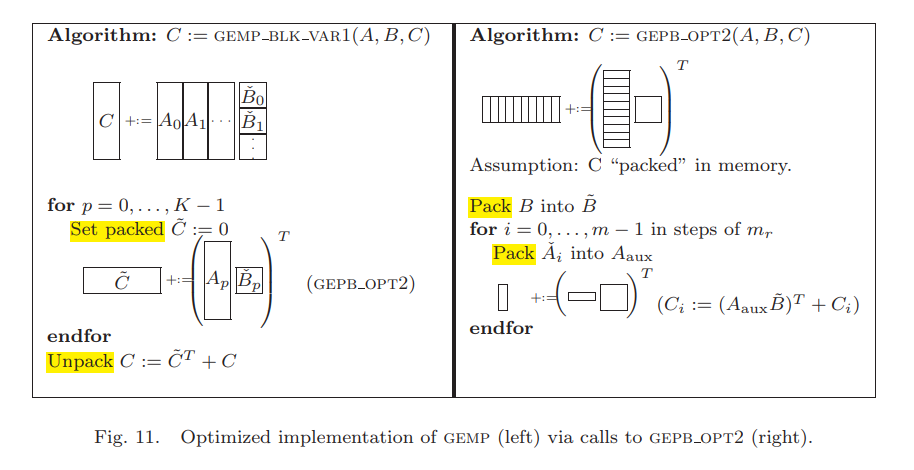
用一个临时的$\tilde{C}$来累加$\tilde{C}=(AB)^T$,$\tilde{B}$保留在L2 cache里。同样因此这里我们需要最大化$T_{\tilde{B}}$,$T_{\tilde{A}}$的上限是$T-(n_r+3)$
5.5 Implementing gepm and gemp with gepdot
$C$保留在L2 cache里,每次乘完$A$的一些列和$B$的一些行后累加到$C$上。下面会介绍这种方法不优。
5.6 Discussion
这里我们比较各种实现方法的优劣,结论是gebp实现gepp在列主序情况下最优。 首先排除gepdot实现。考量L2 cache带宽,gepdot实现中将$C$保留在L2 cache里,然后从内存里加载$A$和$B$,L2 cache和寄存器时间的带宽是gebp实现的两倍,因此gepdot实现是最差的一种实现。这个结论前提假设是,$A$和$B$的分片$A_j$和$B_j$都太大了,无法保留在L2 cache里。 比较gebp实现gepp Fig.8和gebp实现gepp Fig.9,主要区别在于前者pack $B$而从内存加载$C$,后者从内存加载$B$,将计算之后的临时$\tilde{C}$放在buffer,再unpack $\tilde{C}$并加到$C$里。
- gebp实现gepp方法,隐藏从内存读写$C$的开销,而暴露了pack $B$的开销
- gebp实现gepp方法,隐藏从内存读$B$的开销,而暴露unpack $C$的开销
预期unpack $C$是比pack $B$更复杂的操作,因此gebp实现gepp比gebp实现gepp更优。同理gepb实现gepp也比gepb实现gemp更优。
最后比较gebp实现gepp和gepb实现gepp,如果矩阵是按照列主序排列的,那么更合适按列分解矩阵,基于此那么gebp实现gepp优于gepb实现gepp。
6. MORE DETAILS YET
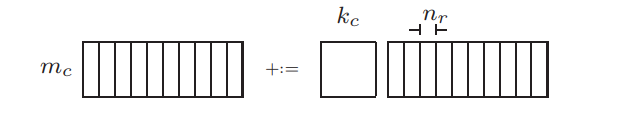
我们只关注最优的gebp实现gepp方法。 $C_{m_c,n}+=A_{m_c,k_c}B_{k_c,n}$,其中
- $A$是block,$A\in \Bbb{R}^{m_c\times k_c}$
- $B$是panel,$B\in \Bbb{R}^{k_c\times n}$
- $C$也是panel,$C\in \Bbb{R}^{m_c\times n}$
6.1 Register blocking
考虑Fig. 8中的$C_{aux}:=\tilde{A}B$,其中$\tilde{A}$和$B$分别在L2和L1 cache。如下图所示,$C_{aux}$分解成$m_r\times n_r$的子矩阵加载到寄存器里计算。
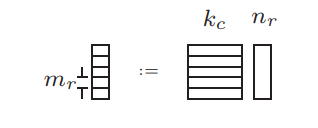
这意味着,计算$C_{j}$的时候不需要子矩阵在L1甚至L2 cache,基于$m_rn_r$ memops 内存操作执行$2m_rn_rk_c$ flops计算量,这里$k_c$选的相对较大。 更详细地描述如何将$A$ pack成$\tilde{A}$,在我们的实现里,$A$的尺寸是$m_c\times k_c$,进一步分解成内存连续的$m_r\times k_c$子矩阵,每个子矩阵自身是列主序排列的,那么$C_{aux}:=\tilde{A}B$计算的时候,访问$\tilde{A}$时就是内存连续的了。还有一种实现是将$A$的转置保存成$\tilde{A}$,这种做法复杂度稍微高一些。
6.2 Choosing $m_r\times n_r$
选择 $m_r\times n_r$时有如下考量
- 一般可用寄存器的一半用于存储$C$分解成的$m_r\times n_r$子矩阵,留剩余寄存器来prefetching $\tilde{A}$和$\tilde{B}$
- $m_r\approx n_r$时,加载的开销平摊到计算量上时,即计算密度最优。
- 如4.2.1章节提到,从L2 cache prefetching $\tilde{A}$到寄存器的开销,不应该比之前的计算开销更长,最理想的是$n_r \geq \frac{R_{comp}}{2R_{load}}$。$R_{comp}=/frac{flops}{cycle}$是CPU浮点运算操作速度,$R_{load}$是L2 cache加载到寄存器的速度
寄存器数目不够会限制gebp_opt1的性能。
6.3 Choosing $k_c$
每加载一个$m_r\times n_r$的$C$子矩阵,都需要和$m_r\times k_c$的$A$子矩阵相乘,为了最大化平摊掉加载开销,$k_c$必须尽量大。但同时$k_c$受以下因素制约
- $B_j$会重用很多次,因此最好保留在L1 cache里。同时set associativity and cache replacement policy限制了$B_j$能够占用多少L1 cache。一般,$k_cn_r$个浮点数应该占用少于一般的L1 cache,才能在加载$\tilde{A}$和$C_{aux}$时将$B_j$逐出cache
- $\tilde{A}$的尺寸是$m_c\times k_c$应该占据一定比例的L2 cache
经验做法,$k_c$个双精度浮点数占据半页,这样得到的值在各种平台都满足。
6.4 Choosing $m_c$
前面已经讨论了尺寸是$m_c\times k_c$的$\tilde{A}$应该
- 能被索引TLB
- 小于L2 cache
事实上还有来自于set associativity and cache replacement policy的限制。 经验做法,$m_c$选择前面限制条件的一半
References
software and the ATLAS project. Parallel Computing 27, 1–2, 3–35. [^4]: Goto, K. and van de Geijn, R. A. 2002. On reducing TLB misses in matrix multiplication. Tech. Rep. CS-TR-02-55, Department of Computer Sciences, The University of Texas at Austin. [^5]: Gunnels, J. A., Gustavson, F. G., Henry, G. M., and van de Geijn, R. A. 2005. A novel model produces matrix multiplication algorithms that predict current practice. In Proceedings of PARA’04. Elsevier.
-
Gunnels, J. A., Gustavson, F. G., Henry, G. M., and van de Geijn, R. A. 2001. FLAME: Formal linear algebra methods environment. ACM Transactions on Mathematical Software 27, 4 (December), 422–455. ↩ ↩2 ↩3
-
Agarwal, R., Gustavson, F., and Zubair, M. 1994. Exploiting functional parallelism of POWER2 to design high-performance numerical algorithms. IBM Journal of Research and Development 38, 5 (Sept.). ↩
-
Whaley, R. C., Petitet, A., and Dongarra, J. J. 2001. Automated empirical optimization of ↩