Machine Learning Theory 机器学习原理
原文
Machine Learning Theostat_model_simplified.pngry - Part 1: Introduction
Machine Learning Theory - Part 2: Generalization Bounds
Machine Learning Theory - Part 3: Regularization and the Bias-variance Trade-off
Part 1: Introduction
定义学习问题
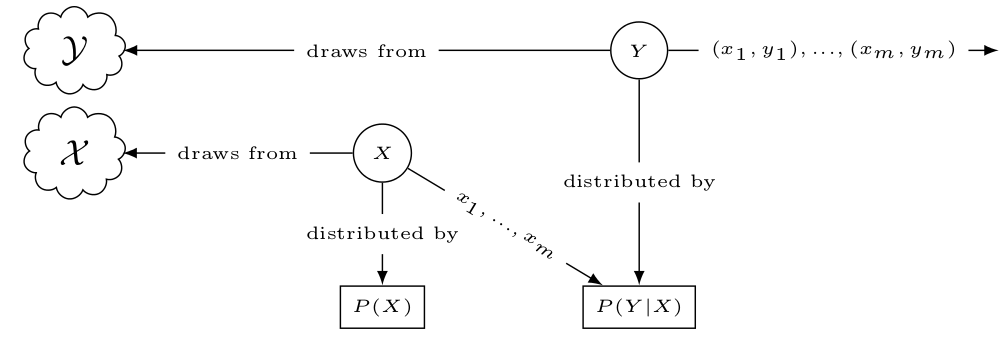
一个监督学习问题里,有一个观察到的数据集$S={(x_1,y_1), …, (x_m,y_m)}$,其中$x_i$是特征向量,$y_i$是label,学习目的是如何从给定$x_i$推断出$y_i$。 已知条件
- 样本$(x_i, y_i)$是从一个更大集里随机采样出来的,正式表达为,两个随机变量$X$和$Y$分别遵循概率分布$P_X$和$P_Y$,$x$和$y$是这两个随机变量随机出来的数值。
- 特征和label之间存在关联,正式表达为,$Y$是$X$的条件概率$P(Y\vert X)=P(X)P(Y\vert X)$
可以定义一个统计模型来表达学习问题里条件概率分布关系
目标函数
我们不想直接和条件概率分布打交道,因此引入目标函数。用目标函数来简化代替条件概率函数。 均值和方差可以用来分解一个随机变量,假设有两个随机变量$V$和$W$,
\[V=E[V\vert W]+(V−E[V\vert W])\]$E[V|W]$是随机变量$V$和$W$的条件均值,上式说明随机变量$V$可以被分解成两部分
- 由另一个随机变量$W$表达部分
- 不能由另一个随机变量 $W$ 表达的随机部分, $Z=V−E[V\vert W]$ ,由全期望公式可知,这部分均值为 $0$, $E(Z)=E(V−E[V\vert W])=E(V)−E(V)=0$ ,因此这部分只包含方差,就是随机变量 $V$ 中不能被随机变量 $W$ 表达的方差 $\xi$
全期望公式 $E(E[V\vert W])=E(X)$
考虑一对随机变量$X$和$Y$随机出来的值$(x_i, y_i )$
\[y_i=E[Y\vert X=x_i ]+\xi\]$\xi$是随机变量$Y$中不能被随机变量$X$表达的方差,称为noise项。
定义函数表示条件期望conditional expectation,将输入空间$X$映射到输出空间$Y$,$X\to Y$,$f(x)$称为目标函数,机器学习任务简化成估计函数$f$
\[E[Y\vert X=x]=f(x)\]那么输入特征和输出label的条件概率表达$P(Y\vert X)$可以重写成
\[y=f(x)+\xi\]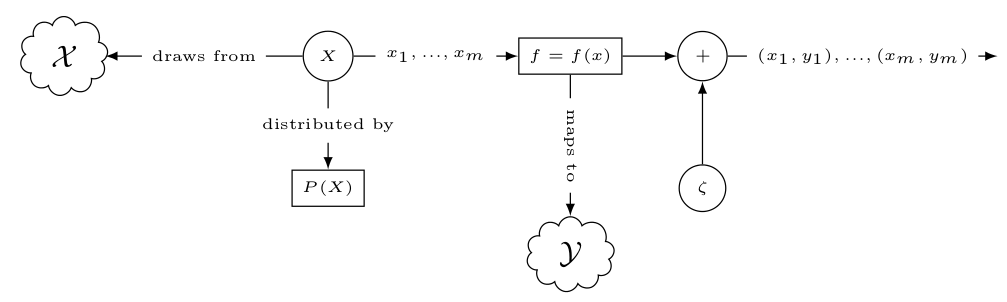
Hypothesis 假设目标函数
在估计目标函数的过程中,因为不能穷举所有函数,我们试图对于目标函数$f(x$)的形式做一个假设hypothesis。
假设目标函数是一个线性函数,或者球面非线性函数,无论做什么假设,都定义一个可能的目标函数空间称为hypothesis set。
比如,我们假设目标函数的形式是$ax+b$,那么hypothesis set $H$就是
\[H={h:x\to y\vert h(x)=ax+b}\]函数$h(x)=3.2x−1$就是这个hypothesis set $H$里的一个具体实例
机器学习任务变成,从hypothesis set $H$里挑选一个实例目标函数$h$,使得实例目标函数$h$能最接近目标函数$f$。接下来的问题是,如何评估一个hypothesis目标函数接近目标函数?
损失函数
在整个数据集应用hypothesis函数$h$,然后求loss的均值,称为in-sample error或者the empirical risk
\[R_{emp}(h)=\frac{1}{m} \sum_{i=1}^m{L(y_i,hx_i)}\]之所以被称为实验性的,是因为这个值来源于数据集中采样出来的实验数据。
The Generalization Error 泛化误差
学习的目标是数据集的概率分布,而不是数据集本身。
这就意味着hypothesis应该在没见过的采样数据上有小误差,在整个概率分布上定义泛化误差
\[R(h)=E_{((x,y)\sim P(X,Y))}[L(y_i,h(x_i))]\]那么问题是,我们不知道这个联合分布$P(X,Y)$,也就没法计算这个泛化误差$R(h)$
Is the Learning Problem Solvable?
$R_{emp}(h)$是基于采样数据集的实验误差,$R(h)$是基于整个联合分布$P(X,Y)$的泛化误差,如何在数学上表示两者接近?
两者差值大于一个非常小值的概率足够小
\[P[sup_{h\in H}\vert R(h)−R_{emp}(h)\vert >\epsilon]\]$R(h)$和$R_{emp}(h)$的差值绝对值的上确界 $sup_{h\in H}$,大于一个非常小值$\epsilon$的概率。如果这个概率足够小,说明$R(h$)和$R_{emp}(h$)的足够接近,那么这个学习问题是可解的。
上确界
一个实数集合A,若有一个实数M,使得A中任何数都不超过M,那么就称M是A的一个上界。在所有那些上界中如果有一个最小的上界,就称为A的上确界。
Part 2: Generalization Bounds
最小化empirical risk或者训练误差并不能解决学习问题,但是如果$R(h)$和$R_{emp}(h)$的差值足够小,学习问题就被被解决。
这里我们解释为什么这个差值可以做到很小。
Independently and Identically Distributed 独立同分布
首先做一个假设是,训练数据样本是独立同分布的 - inference的数据集是从同一个概率分布采样出来,满足同分布 - 采样的时候不依赖之前或之后的采样结果,样本之间没有依赖关系,满足样本之间相互独立
大数定律
当实验足够多次时,实验输出的平均值,接近真实分布的平均值,这称为大数定律。
有一随机变量$X$遵循概率分布$P$,从中采样出$m$个独立同分布的样本$x_1,x_2,…,x_m$,那么
\[\lim_{m\to \infty}P[\vert E_{x\sim P}[X]−\frac{1}{m} \sum_{i=1}^m{x_i} \vert > \epsilon]=0\]这个版本称为弱大数定律,它保证当采样数足够大时,样本均值和真实均值足够接近,强大数定律版本是,样本均值就是真实均值。
应用到泛化误差上,对于某一个hypothesis函数$h$,只要样本数足够多,基于采样数据集的实验误差$R_{emp}(h)$和基于整个整个概率分布的$R(h)$泛化误差就足够接近
\[\lim_{m\to \infty}P[\vert R(h)−R_{emp}(h)\vert > \epsilon]=0\]Hoeffding’s inequality 霍夫丁不等式
大数定律指示指引了原则性方向,但并没有提供任何方法,集中不等式Concentration inequality 提供了方法。
集中不等式描述了一个随机变量是否集中在某个取值附近:
- 马尔可夫不等式,从一个随机变量中采样出大于某特定值的概率上限
- 切比雪夫不等式,从一个随机变量中采样出小于某特定值的概率上限
- 霍夫丁不等式,从一个随机变量中采样出某个特定区间值的概率上限
有一随机变量$X$遵循概率分布$P$,从中采样出$m$个独立同分布的样本$x_1,x_2,…,x_m$,对于每个$a \leq x_i \leq b$,有
\[P[\vert E_{x\sim P}[X]−\frac{1}{m} \sum_{i=1}^m{x_i} \vert > \epsilon] \leq 2\exp{\frac{−2m\epsilon^2}{(b−a)^2}}\]应用到泛化误差上,empirical risk定义是
\[R_{emp}(h)=\frac{1}{m} \sum_{i=1}^m{L(y_i,hx_i)}\]式子$P[\vert E_{x\sim P}[X]−\frac{1}{m} \sum_{i=1}^m{x_i} \vert > \epsilon]$里的$x_i$实际上是测试集误差$L(y_i,hx_i)$,假设测试集误差$L(y_i,hx_i)$被限定在0和1之间,那么$b−a=1$
\[P[\vert R(h)−R_{emp}(h)\vert > \epsilon] \leq 2e^{−2m\epsilon^2}\]其中$m$是样本数,意味着,随着样本数$m$增大,泛化误差指数下降。
这里的公式都是基于给定hypothesis函数 $h$前提下得到,而学习过程中并不知道hypothesis函数,需要从整个hypothesis空间里找一个。
因此我们需要一个泛化边界来反映挑选正确hypothesis函数的过程。
Generalization Bound: 1st Attempt
保证整个hypothesis空间都满足泛化误差不超过$\epsilon$,表达式可以重写成
\[P[sup_{h\in H} \vert R(h)−R_{emp}(h) \vert > \epsilon]=P[\bigcup_{h\in H} \vert R(h)−R_{emp}(h)\vert > \epsilon]\]\(\bigcup\)表示或运算,也就是,对于hypothesis集\(H\)里的每一个hypothesis函数\(h\),都满足泛化误差足够小概率
应用布尔不等式得到
\[P[\bigcup_{h\in H} \vert R(h)−R_{emp}(h)\vert > \epsilon] \leq \sum_{h\in H} P[\vert R(h)−R_{emp}(h)\vert > \epsilon]\]布尔不等式数学归纳法
应用霍夫丁不等式得到
\[\sum_{h\in H} P[\vert R(h)−R_{emp}(h)\vert > \epsilon] \leq \sum_{h\in H}2 e^{−2m\epsilon^2}=2\vert H \vert e^{−2m\epsilon^2} \\\]$\vert H \vert$是hypothesis空间的尺寸,hypothesis函数数目
最终得到,整个hypothesis空间都满足泛化误差不超过$\epsilon$的概率上限
\[P[sup_{h\in H} \vert R(h)−R_{emp}(h) \vert > \epsilon] \leq 2\vert H \vert e^{−2m\epsilon^2} \\\]令
\[2\vert H\vert e^{−2m\epsilon^2}=\sigma \\ \epsilon=(\frac{\ln \vert H\vert + \ln \frac{2}{\sigma}}{2m})^\frac{1}{2} \\ m=\frac{1}{2\epsilon^2}(\ln{\vert H\vert}-\ln{\sigma})\]那么给定泛化误差小值$\epsilon$,得到$\sigma=2\vert H\vert e^{−2m\epsilon^2 }$
\[R(h)−R_{emp}(h)\leq \epsilon \\ R(h)−R_{emp}(h)\leq (\frac{\ln \vert H\vert + \ln \frac{2}{\sigma}}{2m})^\frac{1}{2} \\ R(h)\leq R_{emp}(h) + (\frac{\ln \vert H\vert + \ln \frac{2}{\sigma}}{2m})^\frac{1}{2}\]由$\epsilon=(\frac{\ln \vert H\vert + \ln \frac{2}{\sigma}}{2m})^\frac{1}{2}$可见
- hypothesis空间$\vert H\vert $越大,泛化误差$\epsilon$越大。
由$m=\frac{1}{2\epsilon^2}(\ln{\vert H\vert}-\ln{\sigma})$可见
- 在给定泛化误差$\epsilon$前提下,hypothesis空间$\vert H\vert $越大,所需要的训练集样本数$m$越大
- 在给定hypothesis空间$\vert H\vert $前提下,随着训练集样本数$m$变大,泛化误差$\epsilon$变小收敛至0,收敛速度是$O(\frac{1}{m})$
下面分别讨论一一对应方法和线性hypoth空间两种例子
- 一一对应方法
把训练集的特征和label做一个表一一对应记下来,那么在 - 数据集上的误差是0 $R_{emp}(h)=0$ - hypothesis空间$\vert H\vert $无穷大,因为hypothesis空间大小和样本空间大小一样,$(\frac{\ln \vert H\vert + \ln \frac{2}{\sigma}}{2m})^\frac{1}{2}=\infty$
所以这种方法的泛化误差是无穷大。
- 线性hypothesis空间
hypothesis空间$h(x)=ax+b$,因为$a$和$b$可以取无穷多个值,那么这个空间的$\vert H\vert$也是无穷大,与一一对应的方法泛化误差是一样的,那ML还有意义?
按照不等式$P[\bigcup_{h\in H} \vert R(h)−R_{emp}(h)\vert > \epsilon] \leq \sum_{h\in H} P[\vert R(h)−R_{emp}(h)\vert > \epsilon]$的上限$\sum_{h\in H} P[\vert R(h)−R_{emp}(h)\vert > \epsilon]$看,是的,线性hypothesis和一一对应方法一样没有任何意义,泛化误差无穷大。但是当这个不等式取到上限值时,意味着表示hypothsis空间内的所有的函数都是独立不相关的。
布尔不等式数学归纳法,当$P(A\bigcap B)=0$时,才会出现上限值$P(A\bigcup B)=P(A)+P(B)-P(A\bigcap B)=P(A)+P(B)$
而实际中hypothsis空间内的函数都是相关的,那么上面的不等式并不可能取到上限值。也就是说, 对于两个hypothesis $h_1, h_2\in H$,事件$\vert R(h_1)−R_{emp}(h_1 )\vert >\epsilon $和事件$\vert R(h_2)−R_{emp}(h_2)\vert >\epsilon $不是独立的,这一点成立么?
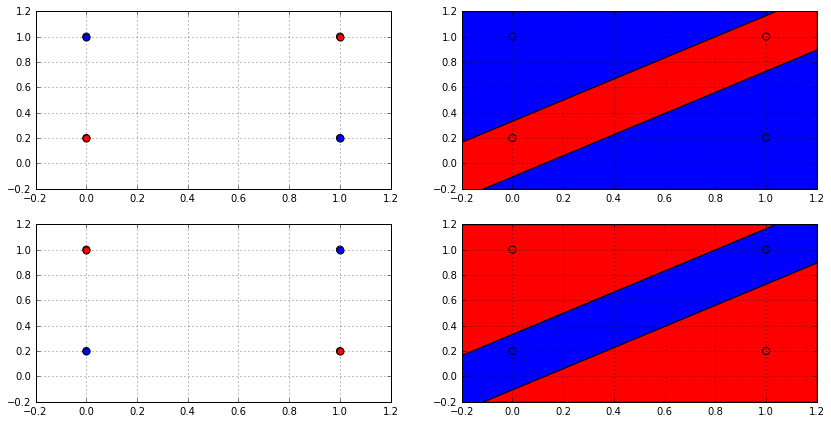
检查独立性假设
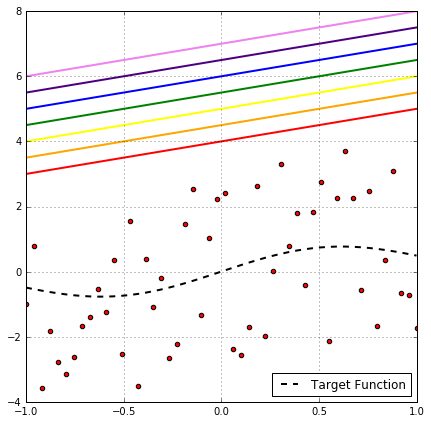
上图给出一个例子说明,在给定线性hypothesis集和数据集下, $h_1, h_2\in H$,事件$\vert R(h_1)−R_{emp}(h_1 )\vert >\epsilon $和事件$\vert R(h_2)−R_{emp}(h_2)\vert >\epsilon $不是独立的。
比如上面图中,如果红色hypothesis有较大泛化误差,那么相同斜率红色上方的所有hypothesis都有较大误差,图上所有的线性hypothesis都是有相关性的,连带着对应的泛化误差时间也是相关的。
既然两个事件不是独立的,那么$\sum_{h\in H} P[\vert R(h)−R_{emp}(h)\vert > \epsilon]$这个上限值太宽松了,太消极悲观了。我们得找一个更合适的上限值。
The Symmetrization Lemma 对称引理
假设我们还有一个尺寸为m的ghost数据集$S′$,可以证明,待证明
\[P[sup_{h\in H} \vert R(h)−R_{emp}(h) \vert > \epsilon] \leq 2*P[sup_{h\in H} \vert R(h)−R'_{emp}(h) \vert > \frac{\epsilon}{2}]\]$R’_{emp}(h)$是hypothesis $h$在ghost数据集$S′$上得到的实验误差,这个式子说明 (数据集S的最大实验泛化误差 - 真实泛化误差)大于$\epsilon$的概率,是(数据集S的最大实验泛化误差 - 数据集S’的最大实验泛化误差)大于$\frac{\epsilon}{2}$的概率的两倍
这样的好处是,不等式右边不存在真实泛化误差,都用实验泛化误差来表示边界上限,因此不需要考虑整个输入输出空间。 这种方法被称为 symmetrization lemma, was one of the two key parts in the work of Vapnik-Chervonenkis (1971).
The Growth Function
看到在一个数据集中,许多hypothesis函数都对应相同的empirical risk,从中选择一个hypothesis称为有效hypothesis。有效hypothesis空间是原hypothesis空间的一个子集,而且依赖于数据集,我们标记为$H_\vert S$
有效hypothesis空间$H_\vert S$是一个,和数据集,hypothesis空间和模型算法复杂度相关的变量,理论上模型算法越复杂,$H_\vert S$可能越大。
那么根据Generalization Bound: 1st Attempt中得到的结论 \(P[sup_{h\in H} \vert R(h)−R_{emp}(h) \vert > \epsilon] = P[\bigcup_{h\in H} \vert R(h)−R_{emp}(h)\vert > \epsilon] \\ \leq \sum_{h\in H} P[\vert R(h)−R_{emp}(h)\vert > \epsilon] \\ = \vert H \vert P[\vert R(h)−R_{emp}(h)\vert > \epsilon]\)
可以得到
\[P[sup_{h\in H_{\vert S \bigcup s'}} \vert R_{emp}(h)−R'_{emp}(h) \vert > \frac{\epsilon}{2}] \leq \vert H_{\vert S \bigcup s'} \vert P[\vert R_{emp}(h)−R'_{emp}(h) \vert > \frac{\epsilon}{2}]\]因为这里同时用数据集$S$和$S′$,所以hypothesis空间被限定在$S\bigcup S′$,那么现在被限定的hypothesis空间的大小是多少?$\vert H_\vert S\bigcup S′ \vert=?$ 限定的hypothesis空间的大小就是,value/label空间$S\bigcup S′$提取的独立元素个数 比如考虑二分类问题,label $y={−1, +1}$,数据集中包含$m$个样本,从这个空间能提取的sample数(value, label)对数是,distinct labellings就是$2^m$
这里有效sample数不是$2m$,而是$2^m$,比如$m=3$情况下,假设$y={−1, +1}, x={−1, 0, +1}$,每个样本都有都有两种可能,$(x,−1)$和$(x,+1)$,那么3个样本张成的空间有$2^3=8$种可能
| CASE | SAMPLE#1 #2 #3 |
|---|---|
| 1 | 1,1,1 |
| 2 | 1,1,-1 |
| 3 | 1,-1,1 |
| 4 | -1,1,1 |
| 5 | -1,-1,1 |
| 6 | 1,-1,-1 |
| 7 | -1,1,-1 |
| 8 | -1,-1,-1 |
给定一个大小是m的数据集$S$,对应hypothesis空间是$H$,用$\Delta_H (m)$ grouth function表示这种情况下的有效sample数目,也就是被个大小是m的数据集S限制的hypothesis空间大小$\Delta_H (m)=\vert H_{\vert S }\vert$
\[P[sup_{h\in H_{\vert S \bigcup s'}} \vert R_{emp}(h)−R'_{emp}(h) \vert > \frac{\epsilon}{2}] \leq \Delta_{H_{\vert S \bigcup s'}}(2m) P[\vert R_{emp}(h)−R'_{emp}(h) \vert > \frac{\epsilon}{2}]\]因为这里用了两个训练集,每个训练集大小是$m$,合并之后的数据集$S \bigcup s’$,最坏情况下,两个数据集没有任何sample是重复的,因此合并数据集$S \bigcup s’$的大小就是$2m$,被合并数据集$S \bigcup s’$限制的hypoth空间大小根据grouth function定义就是$\Delta_{H_{\vert S \bigcup s’}}(2m)$
对于二分类问题$\Delta_H (m)\leq 2^m$,那么
\[\Delta_{H_{\vert S \bigcup s'}}(2m) \leq 2^{2m} \\ P[sup_{h\in H_{\vert S \bigcup s'}} \vert R_{emp}(h)−R'_{emp}(h) \vert > \frac{\epsilon}{2}] \leq 2^{2m} P[\vert R_{emp}(h)−R'_{emp}(h) \vert > \frac{\epsilon}{2}]\]随着样本空间$m$增加,$2^{2m}$项增长得太快了,需要进一步限定
西瓜书
给定一个大小是$m$的数据集$S={x_1, x_2, …, x_m}$,对应hypothesis空间是$H$,每个hypothesis函数都能对$S$中的所有样本给出一个label集合,
\[h_{\vert S} = \{ h(x_1), h(x_2), ... , h(x_m) \}\]随着$m$增大,这个label集合也会相应增大。 定义,在个大小是$m$的数据集$S$上,hypothesis空间$H$的增长函数$\Delta_H (m)$为
\[\Delta_H(m) = \max_{\{ x_1, x_2, ..., x_m \}\in S}{\vert \{ (h(x_1), h(x_2), ... , h(x_m)) \vert h\in H\} \vert}\]遍历hypothesis空间$H$里的所有hypothesis函数$h$,在数据集$S$上能给出的label集合的最大数目。增长函数$\Delta_H(m)$越大,表明hypothesis空间$H$在数据集$S$上能给出的label数越多,hypothesis空间$H$的表达能力越强,对学习任务的适应能力也越强。 因此增长函数$\Delta_H(m)$描述了hypothesis空间$H$在数据集$S$上的表达能力,反映了hypothesis空间$H$的复杂度。
The VC-Dimension
- 三点数据集的二分类问题
假设三个点是$abc$,理论上这个数据集可以提供有$2^3=8$种不同的sample组合,实际上线性hypothesis函数可以分出
\[(a), (b), (c), (a,b), (a,c), (b,c), (a,c,b), (NONE)\]8种组合,和最大有效样本数一致
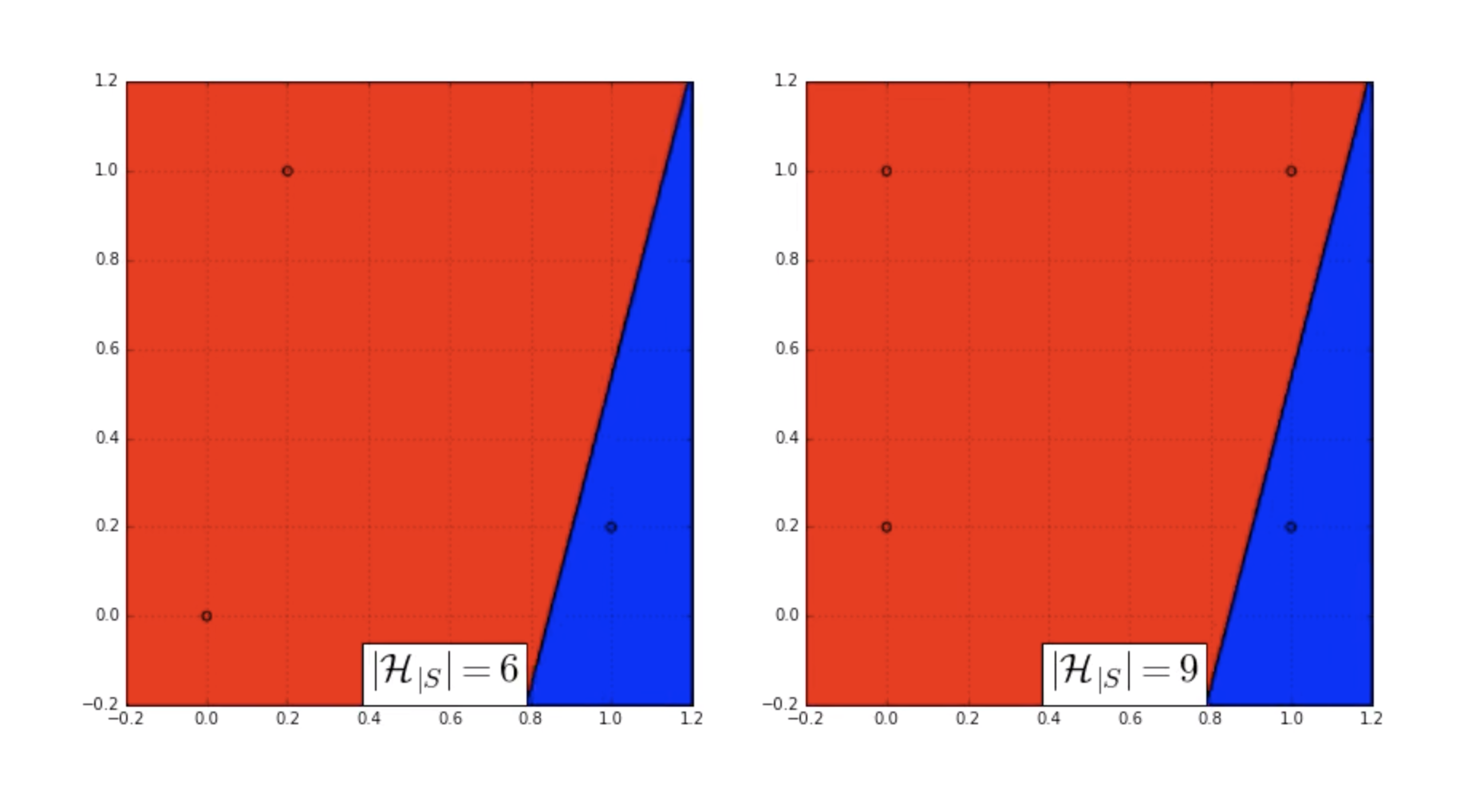
- 四点数据集的二分类问题
假设四个点从左到右从上到下是$abcd$,理论上这个数据集可以提供有$2^4=16$种不同的sample组合,实际上线性hypothesis函数分不出
\[(a,d), (b,c)\]2种组合,实际只能分出$16-2=14$中组合,比最大有效样本数少
二分类任务里,数据集中包含$m$个样本,如果一个hypothesis空间的确能够产生所有$2^m$种有效样本,或者说,在这个数据集中能产生$m$种不同的empirical risk,我们称这个hypothesis空间打散了数据集。
实际上线性hypothesis不能打散任何4点数据集,比如下图
因此我们得到结论,hypothesis空间大小通常都不能达到样本空间大小,或者说hypothesis通常都不能打散样本空间。
如果一个hypothesis空间$H$最多只能分离尺寸是$k$的数据集,$m$是数据集样本总数,那么
\[\Delta_{H}(m) \leq \sum_{i=0}^{k}\begin{pmatrix}m\\i\end{pmatrix}\]$\Delta_{H} (m)$ grouth function表示被样本数是$m$的数据集限制的hypothesis空间大小,或者说,样本数是$m$的数据集加上hypothesis空间所能提供的
最早由Vapnik-Chervonenkis提出,hypothesis空间$H$最多只能分离的数据集大小$k$,被称为$H$的VC-dimension $d_{vc}$
同时这个理论独立被Norbert Sauer证明,因此也被称为Sauer’s lemma
- 2D线性分类器,$d_{vc}=3$
- $R^n$空间内的超平面hyperplane分类器$d_{vc}=n+1$
应用Sauer’s lemma可以进一步减小上边界,进一步推导,待证明
\[\Delta_{H}(m) \leq \sum_{i=0}^{k}\begin{pmatrix}m\\i\end{pmatrix} \leq (\frac{m.e}{d_{vc}})^{d_{vc}} \leq O(m^{d_{dv}}) \\ \begin{pmatrix}m\\i\end{pmatrix} = \frac{m\cdot (m-1)\cdot ... \cdot (m-i+1)}{i!}\]这里O是大O符号(Big O notation)是用于描述函数渐进行为的数学符号。更确切地说,它是用另一个(通常更简单的)函数来描述一个函数数量级的渐近上界。 $d_{vc}$可以用来衡量hypothesis空间的复杂度或者丰富程度
相比于之前的上边界$2^{2m}$,$O(m^{d_{vc}})$已经不再是指数增长了,边界被缩小了。
西瓜书
- 打散定义
hypothesis空间$H$在数据集$S$上能给出的label最大数目为增长函数$\Delta_H(m)$,假设这是一个二分类任务,样本数为$m$的数据集$S$最大只可能出现$2^m$种label,如果
\[\Delta_H(m)=2^m\]那么我们称数据集$S$被hypothesis空间$H$打散。
- VC维定义
hypothesis空间$H$的VC维定义是,能被$H$打散的最大数据集大小,比如二分类里
\[d_{VS}(H)=\max\{m: \Delta_H(m)=2^m\}\]$d_{VS}(H)=d$表明,存在大小为$d$的数据集可以被hypothesis空间$H$打散,而且这和数据集的数据分布无关。注意,这不意味着所有大小为$d$的数据集都可以被hypothesis空间$H$打散。 举例,上文中的线性hypothesis可以打散3点数据集,但不能打散任何4点数据集,所以线性hypothesis的VC维为3。
- Sauer’s lemma
Sauer引理给出VC维和增长函数之间的定量关系,假设hypothesis空间$H$的VC维是$d$
\[\Delta_{H}(m) \leq \sum_{i=0}^{d}\begin{pmatrix}m\\i\end{pmatrix}\]数学归纳法证明可证明,见书未证明。
由上面的公式可以推导增长函数的上限
\[\Delta_{H}(m) \leq (\frac{e\cdot m}{d})^{d}\]基础1,假设数据集大小$m$远大于VS维$d$
\[m>d \\ (\frac{m}{d})^{d-i} > 1\]基础2,二项式级数展开公式
\[(1+x)^m = \sum_{i=0}^{\infty}\begin{pmatrix}m\\i\end{pmatrix} x^{i} \geq \sum_{i=0}^{d}\begin{pmatrix}m\\i\end{pmatrix} x^{i}\]基础3,洛必达法则,夹逼定理可证明
\[\lim_{x->\infty}{(1+x)^{\frac{1}{x}}}=e \\ \lim_{x->\infty}{\ln{(1+x)^{\frac{1}{x}}}}=1\]可以证明
\[\Delta_{H}(m) \leq \sum_{i=0}^{d}\begin{pmatrix}m\\i\end{pmatrix} \\ \leq \sum_{i=0}^{d}\begin{pmatrix}m\\i\end{pmatrix} (\frac{m}{d})^{d-i}\\ = (\frac{m}{d})^{d}\sum_{i=0}^{d}\begin{pmatrix}m\\i\end{pmatrix} (\frac{d}{m})^{i}\\ \leq (\frac{m}{d})^{d}\sum_{i=0}^{m}\begin{pmatrix}m\\i\end{pmatrix} (\frac{d}{m})^{i} \\ \leq (\frac{m}{d})^{d}\sum_{i=0}^{\infty}\begin{pmatrix}m\\i\end{pmatrix} (\frac{d}{m})^{i} \\ = (\frac{m}{d})^{d}(1+\frac{d}{m})^m \\ = (\frac{m}{d} (1+\frac{d}{m})^\frac{m}{d})^d \\ \leq (\frac{e\cdot m}{d})^d\]The VC Generalization Bound
讨论,整个hypothesis空间都满足泛化误差不超过$\epsilon$的概率,表示为$P[sup_{h\in H} \vert R(h)−R_{emp}(h) \vert > \epsilon] $ 在Generalization Bound: 1st Attempt里,单纯应用Hoeffding’s inequality 霍夫丁不等式可以得到
\[P[sup_{h\in H} \vert R(h)−R_{emp}(h) \vert > \epsilon] \leq 2\vert H \vert e^{−2m\epsilon^2} \\\]令 $\sigma=2\vert H\vert e^{−2m\epsilon^2}$有
\[\epsilon=(\frac{\ln \vert H\vert + \ln \frac{2}{\sigma}}{2m})^\frac{1}{2}\]可以得到泛化误差的上限
\[R(h) \leq R_{emp}(h) + \epsilon \\ = R_{emp}(h) + (\frac{\ln \vert H\vert + \ln \frac{2}{\sigma}}{2m})^\frac{1}{2}\]在给定hypothesis空间$\vert H\vert $前提下,随着训练集样本数$m$变大,泛化误差$\epsilon$变小收敛至0,收敛速度是$O(\frac{1}{m})$。
Vapnik-Chervonenkis theory 可以利用增长函数来进一步缩小边界,进而增快收敛速度。 增长函数$\Delta_H(m)$描述了hypothesis空间$H$在数据集$S$上的表达能力,反映了hypothesis空间$H$的复杂度。 Vapnik-Chervonenkis theory 定义证明了增长函数和泛化误差之间的关系 \(P[sup_{h\in H} \vert R(h)−R_{emp}(h) \vert > \epsilon] \leq 4\Delta_H(2m) \exp(-\frac{m\epsilon^2}{8})\)
令$\sigma = 4\Delta_H(2m) \exp(-\frac{m\epsilon^2}{8})$有
\[\epsilon = \sqrt{\frac{8\ln{\Delta_H(2m)}+8\ln{\frac{4}{\sigma}}}{m}}\]可以得到泛化误差的上限
\[R(h) \leq R_{emp}(h)+\epsilon \\ =R_{emp}(h)+\sqrt{\frac{8\ln{\Delta_H(2m)}+8\ln{\frac{4}{\sigma}}}{m}}\]代入上面得到的结论$\Delta_{H}(m) \leq (\frac{e\cdot m}{d})^{d}$得到
\[R(h)=R_{emp}(h)+\sqrt{\frac{8\ln{(\frac{e\cdot 2m}{d})^{d}}+8\ln{\frac{4}{\sigma}}}{m}} \\ =R_{emp}(h)+\sqrt{\frac{8d\ln{(\frac{2m}{d}+1)}+8\ln{\frac{4}{\sigma}}}{m}}\]在给定hypothesis空间$\vert H\vert $前提下,随着训练集样本数$m$变大,泛化误差$\epsilon$变小收敛至0,收敛速度是$O(\frac{1}{\sqrt{m}})$。 VC定理将收敛速度从$O(\frac{1}{m})$提高到$O(\frac{1}{\sqrt{m}})$。
One Inequality to Rule Them All
这里讨论的VC边界只适用于二分类问题,但是VC概念框架,包括打散,增长函数和VC维度,同样可以推广到多分类和回归问题。 Natarajan维度是VC维度在多分类问题上的推广,pseudo维度是VS维度在回归问题上的推广。 还有Rademacher复杂度,通过hypothesis空间对于随机噪声的适应性来评估hypothesis空间的丰富程度。Rademacher复杂度可以适用任何学习问题。 不管用什么工具,泛化误差边界都可以表示成
\[R(h)=R_{emp}(h)+C(\vert H \vert, N, \sigma)\]这里$C$是hypothesis空间复杂度/大小/丰富程度,$N$是数据集大小,$1-\sigma$是关于这个边界的置信度。这个公式说明,泛化误差可以有两方面组成,实验误差和模型复杂度。
Part 3: Regularization and the Bias-variance Trade-off
上面得到泛化误差的结论
\[R(h)=R_{emp}(h)+C(\vert H \vert, N, \sigma)\]假设训练集$N$和置信度$\sigma$固定,进一步简化为
\[R(h)=R_{emp}(h)+C(\vert H \vert)\]后面的讨论都会基于这个简化公式。 这个公式直觉上看,hypothesis空间应该越丰富,泛化误差越小,实际中不是这样。
Why rich hypotheses are bad?
假设从区间$[-1, 1]$里均匀采样出样本$x$,目标函数为$f(x)=\sin(x)$,生成带噪信号$y=f(x)+\zeta$,这里$\zeta$是随机噪声,均值0方差2。 在100个仿真数据集上,每个数据集200个点上分别训练三个hypothesis
- 线性hypothesis,$h(x)=w_1x+w_0$
- 立方hypothesis,$h(x)=w_1x+w_2x^2+w_3x^3+x_0$
- 10维多项式hypothesis
每个模型用浅蓝色曲线表示,100集平均的模型用深蓝色曲线表示,目标函数用黑色曲线表示。 正常如果没有噪声的话,所有数据集点都在黑色曲线上,图中偏离目标函数黑色曲线的点都是带噪样本。距离越远,噪声越大。
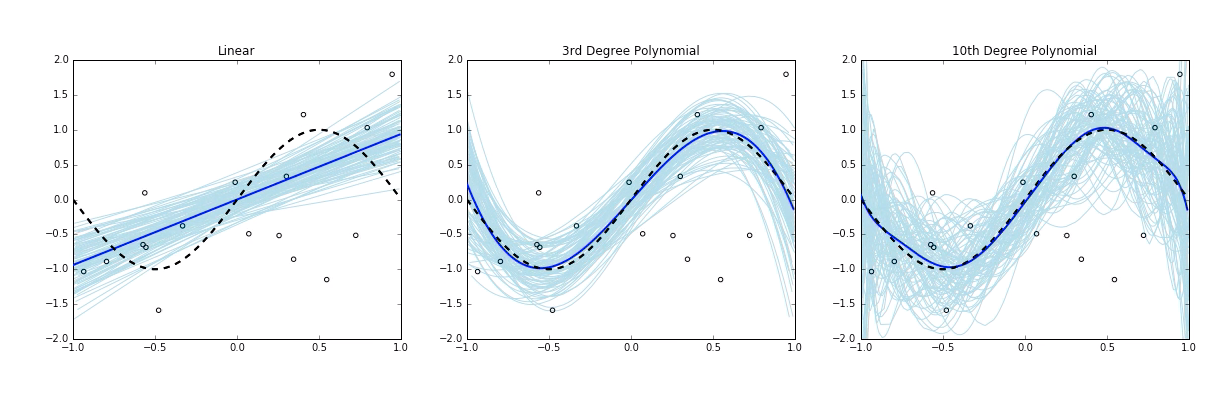
首先注意到,hypothesis越复杂越丰富,和目标函数的平均误差越小。 定义bias为期望输出和真实标记的差别
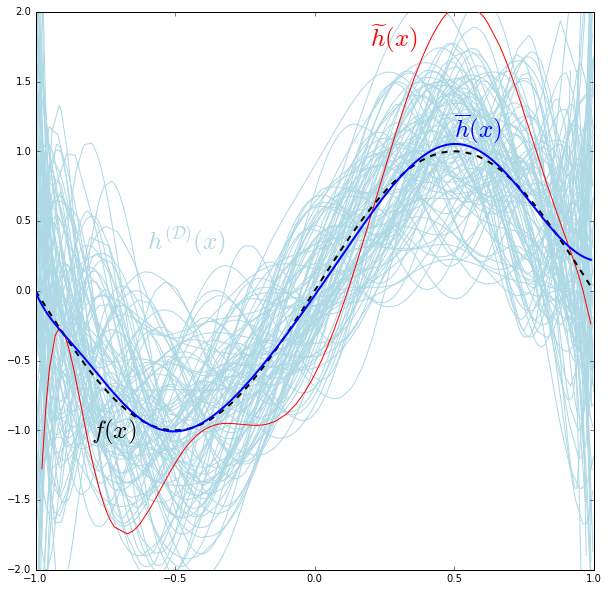
\[bias(x)=\overline{h}(x)-f(x)\]其中$f(x)$是真实标记,$\overline{h}(x)$是期望输出,是不同训练集上训练的不同hypothesis得到的输出取平均,即$\overline{h}(x)=E_{D}[h^{(D)}(x)]$,$h^{(D)}(x)$表示训练集$D$上训练出来的hypothesis函数。 将目标函数$f(x)=\sin(x)$用泰勒级数展开
\[\sin(x)=x-\frac{x^3}{3!}+\frac{x^5}{5!}-\frac{x^7}{7!}+\frac{x^9}{9!}-...\]随着分解的级数越来越大,高阶成分对函数值得影响也越来越小。
- 线性hypothesis,$h(x)=w_1x+w_0$可以拟合出$\sin(x)$的$x$项,但是从$x^3$往面就没法拟合。
- 立方hypothesis,$h(x)=w_1x+w_2x^2+w_3x^3+x_0$可以拟合出$x, x^3$项,从$x^4$往面就没法拟合。
- 10维多项式hypothesis,可以拟合出$x, x^3, x^5, x^7, x^9$项,从$x^11$往面就没法拟合。
10维多项式相比于立方函数,能减少的bias有限,因为立方函数不能拟合的$x^5, x^7, x^9$对于输出贡献有限。
其次注意到,hypothesis越复杂,hypothesis拟合噪声的能力越强。 比如10维多项式函数可以拟合到图像顶部的,远远偏离目标函数的点,我们称这个hypothesis在这个带噪数据集里过拟合了。
量化过拟合 不同训练集上训练的不同hypothesis,相同输入$x$经过不同hypothesis得到$h(x)$之间的方差来量化过拟合程度 \(var(x)=E_{D}[(h^{(D)}(x)-\overline{h}(x))^2]\)
总结
- hypothesis越复杂,和目标函数的平均误差越小
- hypothesis越复杂,越容易过拟合
The Bias-variance Decomposition 偏差方差分解
因为训练集$D$是随机从数据集中采样的,因此 $h^{(D)}(x)$也可以看作是随机变量。用part1中的trick,一个随机变量可以分解成两个成分,表达均值的确定成分和表达方差的随机部分
\[h^{(D)}(x)=\overline{h}(x)+H_{\sigma}^{(D)}(x)\]其中$H_{\sigma}^{(D)}(x)$的均值是0,方差等于hypothesis的方差
\[Var(H_{\sigma}^{(D)}(x))=E_{D}[(h^{(D)}(x)-\overline{h}(x))^2]\]用均方误差函数$L(\hat{y}, y)=(\hat{y}-y)^2$,可以定义在某一个采样点$x$出的误差Risk
\[R(h(x)) = E_{D}[L(h^{(D)}(x), f(x))] = E_{D}[(h^{(D)}(x)-f(x))^2]\]代入$h^{(D)}(x)=\overline{h}(x)+H_{\sigma}^{(D)}(x)$和$bias(x)=\overline{h}(x)-f(x)$可得到
\[R(h(x)) = E_{D}[(\overline{h}(x)+H_{\sigma}^{(D)}(x)-f(x))^2] \\ = E_{D}[(bias(x)+H_{\sigma}^{(D)}(x))^2] \\ = E_{D}[(bias(x))^2+2bias(x)H_{\sigma}^{(D)}(x)+(H_{\sigma}^{(D)}(x))^2]\]因为bias不依赖数据集$D$
\[R(h(x)) = (bias(x))^2 + 2bias(x)E_{D}[H_{\sigma}^{(D)}(x)] + E_{D}[(H_{\sigma}^{(D)}(x))^2]\]因为$H_{\sigma}^{(D)}(x)$的定义就是均值为0,所以
\[Mean(H_{\sigma}^{(D)}(x))=E_{D}[H_{\sigma}^{(D)}(x)]=0 \\ Var(H_{\sigma}^{(D)}(x))=E_{D}[(H_{\sigma}^{(D)}(x)-Mean(H_{\sigma}^{(D)}(x)))^2]=E_{D}[(H_{\sigma}^{(D)}(x))^2]\]那么有
\[R(h(x)) = (bias(x))^2 + E_{D}[(H_{\sigma}^{(D)}(x))^2] \\ = (bias(x))^2 + Var(H_{\sigma}^{(D)}(x)) \\ = (bias(x))^2 + E_{D}[(h^{(D)}(x)-\overline{h}(x))^2] \\ = (bias(x))^2 + var(x)\]西瓜书
$h^{(D)}$表示训练集$D$上训练出来的hypothesis函数,$h^{(D)}(x)$是这个hypothesis函数在$x$点的预测输出。因为训练集$D$是随机从数据集中随机采样的,因此 $h^{(D)}(x)$也可以看作是随机变量。
- 偏差 bias bias定义为$h^{(D)}(x)$的期望$\overline{h}(x)=E_{D}[h^{(D)}(x)]$,和真实标记$f(x)$的偏离程度,反映算法本身的拟合能力
- 方差 var var反映$h^{(D)}(x)$内部的波动情况,或者说偏离均值的程度,反映训练集波动导致的学习性能变化,数据扰动所造成的影响
- 噪声 噪声反映真实标记和数据集中的标记的偏离
用均差误差函数作为loss函数,预测输出为$h^{(D)}(x)$,真实label为$y$,数据集实际label为$y_D$,期望的泛化误差可以分解成偏差,方差和噪声之和。
\[E_{D}[(h^{(D)}(x)-y_D)^2] = E_{D}[(h^{(D)}(x)-\overline{h}(x)+\overline{h}(x)-y_D)^2] \\ = E_{D}[(h^{(D)}(x)-\overline{h}(x))^2] + E_{D}[(\overline{h}(x)-y_D)^2] + E_{D}[2(h^{(D)}(x)-\overline{h}(x))(\overline{h}(x)-y_D)] \\ \quad \\ \because \overline{h}(x)=E_{D}[h^{(D)}(x)] \\ \therefore E_{D}[2(h^{(D)}(x)-\overline{h}(x)]=E_{D}[2(h^{(D)}(x)]-\overline{h}(x)=0 \\ \quad \\ = E_{D}[(h^{(D)}(x)-\overline{h}(x))^2] + E_{D}[(\overline{h}(x)-y_D)^2] \\ = var(x) + E_{D}[(\overline{h}(x)-y+y-y_D)^2] \\ = var(x) + E_{D}[(\overline{h}(x)-y)^2] + E_{D}[(y-y_D)^2] + E_{D}[2(\overline{h}(x)-y)(y-y_D)] \\ \quad \\ \text{assume}\qquad E_{D}[y-y_D]=0 \quad \\ = var(x) + E_{D}[(\overline{h}(x)-y)^2] + E_{D}[(y-y_D)^2] \\ = var(x) + (bias(x))^2 + \epsilon^2\]一般来说bias和var是冲突的,称为Bias–variance tradeoff。
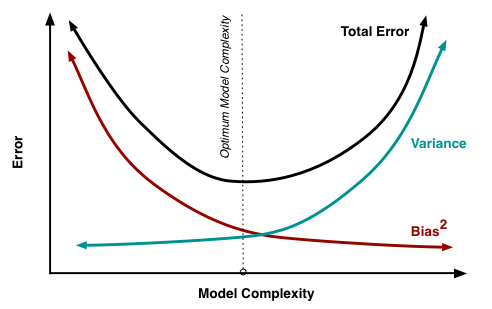
给定学习任务,调整学习算法的训练程度,
- 当训练不足时,模型拟合能力不够,训练数据的扰动不足以使得模型输出产生明显变化,此时bias主导了泛化误差,此时状态欠拟合
- 当训练充足时,模型拟合能力变强,训练数据的扰动会导致模型输出显著变化,此时var主导了泛化误差,此时状态过拟合